期刊VIP學(xué)術(shù)指導(dǎo) 符合學(xué)術(shù)規(guī)范和道德
保障品質(zhì) 保證專業(yè),沒有后顧之憂
 期刊VIP網(wǎng)
期刊VIP網(wǎng)
- 機(jī)械
- 基于LM算法的機(jī)械臂軌跡規(guī)劃研究
期刊VIP學(xué)術(shù)指導(dǎo) 符合學(xué)術(shù)規(guī)范和道德
保障品質(zhì) 保證專業(yè),沒有后顧之憂
來源:期刊VIP網(wǎng)所屬分類:機(jī)械時(shí)間:瀏覽:次
摘 要:針對(duì)提高多關(guān)節(jié)機(jī)械臂軌跡規(guī)劃精準(zhǔn)率和效率的問題,利用Peter Corke開發(fā)的robotics-toolbox工具箱在MATLAB上進(jìn)行機(jī)械臂的運(yùn)動(dòng)學(xué)建模,并設(shè)計(jì)了一種軌跡規(guī)劃算法。該算法依托于LM算法,結(jié)合逆運(yùn)動(dòng)學(xué)獲取關(guān)節(jié)角序列位置,在對(duì)應(yīng)相關(guān)軌跡的同時(shí),確保關(guān)節(jié)角速度和加速度曲線連續(xù)且光滑。研究結(jié)果表明,通過該算法不但可以得到相對(duì)穩(wěn)定的運(yùn)動(dòng)曲線,其迭代速度相比傳統(tǒng)的梯度下降法,在擬合離散點(diǎn)過程中具有更快的迭代速度。
關(guān)鍵詞:機(jī)械臂;LM算法;軌跡規(guī)劃;MATLAB Toolbox;最小二乘法;工業(yè)互聯(lián)網(wǎng);機(jī)器人
0 引言
如今隨著科技的發(fā)展,機(jī)械臂在工業(yè)生產(chǎn)中的地位越來越不可替代,而軌跡規(guī)劃是機(jī)械臂設(shè)計(jì)過程中的重要組成部分。一般而言,可利用機(jī)械臂的可靠性標(biāo)準(zhǔn)及效率標(biāo)準(zhǔn)評(píng)估機(jī)械臂性能,因此本文研究核心在于如何提升機(jī)械臂的可靠性以及如何改善機(jī)械臂運(yùn)行效率[1]。目前,研究人員在規(guī)劃?rùn)C(jī)械臂運(yùn)動(dòng)軌跡方面提出了很多方案,但是每種方案的指向性較強(qiáng),往往僅適用于一種或少量場(chǎng)景,而難以在大部分場(chǎng)景中獲取最優(yōu)解。由于存在較多優(yōu)化目標(biāo),時(shí)間、能量及精準(zhǔn)度等均是優(yōu)化的切入點(diǎn)[2],研究人員也可選擇粒子群算法或蟻群算法等多種算法。
相對(duì)而言,國(guó)外研究人員在機(jī)械臂方面的研究處于領(lǐng)先地位。如Ohta等[3]設(shè)計(jì)了一種軌跡規(guī)劃方法,將最優(yōu)軌跡劃分成兩部分,在離線追蹤之后恢復(fù)在線追蹤,結(jié)合機(jī)械臂的各項(xiàng)物理約束選擇三次樣條函數(shù),在此基礎(chǔ)上對(duì)機(jī)械臂軌跡進(jìn)行規(guī)劃,并基于特定算法完成相應(yīng)優(yōu)化,以便在最大程度上縮短實(shí)現(xiàn)時(shí)間。國(guó)內(nèi)研究人員在相關(guān)領(lǐng)域也進(jìn)行了廣泛研究,在算法和操作理念方面均有所創(chuàng)新。如田海波等[4]通過近似代換的方法,將約束邊界條件納入考量范圍,通過幾何法確定最優(yōu)解,有利于實(shí)現(xiàn)預(yù)期優(yōu)化目標(biāo)。需要強(qiáng)調(diào)的是,通過幾何法規(guī)劃?rùn)C(jī)械臂軌跡的復(fù)雜度較高,在很多場(chǎng)景下難以操作[5]。孫亮等[6]通過五段三次多項(xiàng)式軌跡獲取角速度和角加速度,為機(jī)械臂軌跡規(guī)劃提供數(shù)據(jù)支持。
4 仿真驗(yàn)證
此次仿真得到的結(jié)果如圖1所示,并基于此完成模型構(gòu)建。
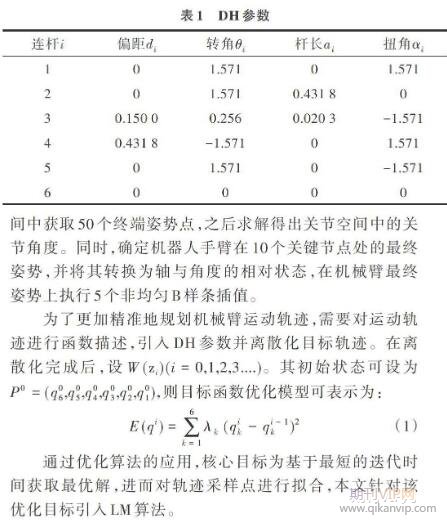
通過分析DH坐標(biāo)系,可確定初始狀態(tài)相關(guān)參數(shù)[18]以及連桿系數(shù),在此基礎(chǔ)上確定目標(biāo)點(diǎn)坐標(biāo),進(jìn)而利用DH坐標(biāo)系計(jì)算機(jī)械臂末端狀態(tài)值,由robot-toolbox工具箱可計(jì)算得出DH參數(shù)如圖2所示。
本文得到的軌跡效果如圖3所示。
本文在不同方法對(duì)比分析的基礎(chǔ)上,針對(duì)機(jī)械臂軌跡規(guī)劃問題,選擇較為合適的優(yōu)化方法完成迭代過程,利用MATLAB Toolbox工具箱計(jì)算得出的實(shí)時(shí)動(dòng)畫與曲線圖反映迭代次數(shù)與優(yōu)化結(jié)果的關(guān)系,以便整合離散數(shù)據(jù),進(jìn)而得出比較準(zhǔn)確的仿真結(jié)果。結(jié)果顯示,在大部分時(shí)間內(nèi),尤其在20輪迭代前,梯度下降法的迭代速度遠(yuǎn)不及LM算法,而在40輪迭代后,二者都趨于穩(wěn)定。LM算法在迭代過程中表現(xiàn)出整體穩(wěn)定的特征,但同時(shí)在某些迭代過程中會(huì)出現(xiàn)梯度上升的情況,這與參數(shù)初始化選擇及超參數(shù)調(diào)整有關(guān),可通過后續(xù)調(diào)參對(duì)迭代效果作進(jìn)一步優(yōu)化。
5 結(jié)語
為了更好地進(jìn)行機(jī)械臂軌跡規(guī)劃,同時(shí)為避免機(jī)械臂在運(yùn)動(dòng)過程中產(chǎn)生震動(dòng),影響其使用性能,在MATLAB中建立運(yùn)動(dòng)模型并進(jìn)行實(shí)時(shí)狀態(tài)追蹤。結(jié)果顯示,在設(shè)定的運(yùn)動(dòng)范圍內(nèi)機(jī)械臂運(yùn)行平穩(wěn),運(yùn)行過程中未出現(xiàn)震動(dòng)情況。在仿真環(huán)境中進(jìn)行實(shí)驗(yàn),可避免對(duì)機(jī)械臂的損壞,為后續(xù)研究工作的順利開展提供保障。
本文將LM算法引入機(jī)械臂軌跡過程規(guī)劃,提升了軌跡規(guī)劃的精準(zhǔn)度。與梯度下降法等傳統(tǒng)方法相比,梯度下降法和LM算法都可在一定時(shí)間內(nèi)逼近最優(yōu)解。LM算法可在更短時(shí)間內(nèi)下降并得出最優(yōu)解,主要由于梯度下降法容易陷入局部最優(yōu)解。牛頓法因在計(jì)算過程中采用Hessian矩陣,增加了計(jì)算復(fù)雜度,而LM算法由于阻尼系數(shù)的存在,使得阻尼過大時(shí)近似梯度下降法,阻尼過小時(shí)則接近高斯牛頓法,結(jié)合了二者優(yōu)點(diǎn),使其成為在求解非線性最小二乘問題時(shí)較為實(shí)用的算法之一。但其受到權(quán)重參數(shù)初始化及超參數(shù)選取的影響,仍會(huì)在某些迭代時(shí)刻出現(xiàn)梯度上升的情況。本文在確定數(shù)學(xué)模型的基礎(chǔ)上,基于MATLAB構(gòu)建可視化模型,并結(jié)合優(yōu)化算法規(guī)劃其運(yùn)動(dòng)軌跡。結(jié)果表明,LM算法迭代效果良好,后續(xù)還可通過調(diào)整超參數(shù)對(duì)其作進(jìn)一步改進(jìn)。
參考文獻(xiàn):
[1] MOHRI A, FURUNO S, YAMAMOTO M. Trajectory planning of mobile manipulator with end-effector's specified path[C]. IEEE/RSJ International Conference on Intelligent Robots & Systems, 2001:2264-2269.
[2] SHARIATI-NIA M,GHAYOUR M,MOSAYEBI M . Optimal trajectory planning of a mobile robot with spatial manipulator for obstacle avoidance[C]. Gyeonggi-do:International Conference on Control, Automation and Systems, 2010.
[3] OHTA K,SVININ M M,LUO Z W,et al. Optimal trajectory formation of constrained human arm reaching movements[J]. Biological Cybernetics,91(1):23-36.
[4] 田海波, 馬宏偉, 魏娟. 串聯(lián)機(jī)器人機(jī)械臂工作空間與結(jié)構(gòu)參數(shù)研究[J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2013, 44(4):196-201.
[5] 姜宏超, 劉士榮, 張波濤. 六自由度模塊化機(jī)械臂的逆運(yùn)動(dòng)學(xué)分析[J]. 浙江大學(xué)學(xué)報(bào)(工學(xué)版), 2010(7):1348-1354.
[6] 孫亮, 馬江, 阮曉鋼. 六自由度機(jī)械臂軌跡規(guī)劃與仿真研究[J]. 控制工程,2010(3):388-392.
[7] DEAN-LEON E,NAIR S, KNOLL A. User friendly Matlab-toolbox for symbolic robot dynamic modeling used for control design[C].IEEE International Conference on Robotics & Biomimetics,2012:2081-2088.